Напомним, что отрезок, для которого указано, какой из его концов считается началом, а какой — концом, называется вектором. Вектор на плоскости можно задать двумя числами — его координатами по горизонтали и вертикали.
Помимо очевидных сложения, вычитания и умножения на константу (скаляр — одно число), у векторов можно ввести и свои особенные операции, которые нам упростят жизнь.
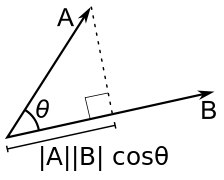
Скалярное произведение (англ. dot product) — произведение длин векторов на косинус угла между ними. Для него справедлива следующая формула:
\[ a \cdot b = x_a x_b + y_a y_b \]
Она доказывается муторно и чисто технически, так что мы это делать не будем.
Геометрически, она равна проекции вектора \(b\) на вектор \(a\), помноженный на длину \(а\):
У него есть полезные свойства:
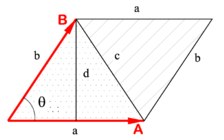
Векторное произведение (англ. cross product) — произведение длин векторов на синус угла между ними, причём знак этого синуса зависит от порядка операндов. Оно тоже удобно выражается в координатах:
\[ a \times b = x_a y_b - y_a x_b \]
Геометрически, это ориентированный объем параллелограмма, натянутого на вектора \(a\) и \(b\):
Его свойства:
Вообще говоря, векторное произведение определяется не так. Оно определено как вектор такой же длины, но перпендикулярный обоим исходным векторам. Это имеет применение в трёхмерной геометрии и физике, но нам об этом думать не надо.
Благодаря этим свойствам, почти все проверки в геометрии можно описать через них, а не уравнениями.
Принадлежность точки треугольнику. Пусть у нас есть треугольник \(ABC\) (заданный против часовой стрелки) и точка \(P\). Тогда она должна лежать слева от всех трёх векторов \(AB\), \(BC\) и \(CA\). Это условие задаст пересечение трёх полуплоскостей, которое и будет нужным треугольником.
\[ \text{P лежит внутри ABC} \iff \begin{cases} (B-A) \times (P-A) \geq 0 \\ (C-B) \times (P-B) \geq 0 \\ (A-C) \times (P-C) \geq 0 \\ \end{cases} \]
Площадь треугольника. Можно пользоваться готовыми формулами, а можно и свойством векторного произведения.
\[ V = \frac{1}{2} (B-A) \times (C-A) \]
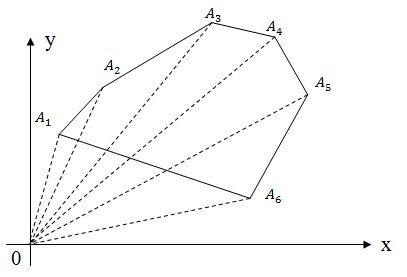
Площадь произвольного многоугольника. Если многоугольник задан последовательностью вершин в каком-то порядке, то можно считать так: для каждого ребра добавим его ориентированную площадь от начала координат. Какие-то слагаемые будут положительными (которые на последнем слое, а какие-то — отрицательными).
Забудьте о формуле Герона и всегда считайте площади через векторное произведение.
Кстати, из формулы для площади треугольника следует, что площадь любой фигуры будет либо целым числом, либо рациональным с двойкой в знаменателе. Часто в в задачах входные данные целочисленные, и, чтобы оставаться в целых числах, когда мы считаем какую-нибудь площадь, иногда имеет смысл умножить все входные числа на \(2\) (см. «точность»).
Проверка на выпуклость. Можно пройтись по сторонам многоугольника и проверять векторным произведением, что мы поворачиваем всегда в одну сторону, то есть для всех последовательных точек \(a\), \(b\), \(c\) проверить, что \((b-a)\times(c-a) > 0\).
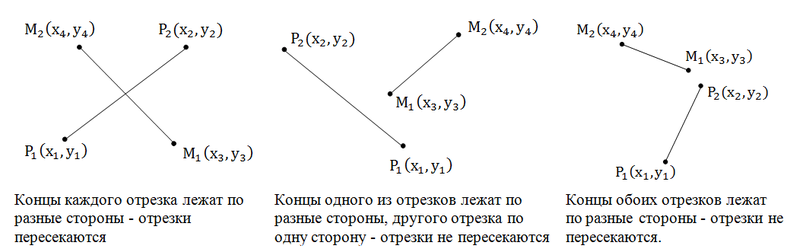
Пересекаются ли отрезки.
Прямую можно задать уравнением вида \(Ax + By + C = 0\). Полуплоскость можно задать таким же неравенством.
У прямой есть вектор нормали с координатами \((A, B)\). Он перпендиуклярен прямой, а в случае с полуплоскостью \(Ax + By + C \geq 0\) будет указывать в сторону самой полуплоскости.
Чтобы найти расстояние от точки \((x_0, y_0)\) до прямой \(Ax + By + C = 0\), можно воспользоваться следующей формулой:
\[ d = \frac{|Ax_0+By_0+C|}{\sqrt{A^2+B^2}} \]
Точка пересечения. По сути, найти точку пересечения двух прямых — это то же самое, что и найти точку, которая удовлетворяет обоим условиям их уравнений:
\[ \begin{cases} A_1 x + B_1 y + C_1 = 0 \\ A_2 x + B_2 y + C_2 = 0 \end{cases} \implies \begin{cases} -x = \frac{B_1 y + C_1}{A_1} \\ -x = \frac{B_2 y + C_2}{A_2} \end{cases} \implies \frac{B_1 y + C_1}{A_1} = \frac{B_2 y + C_2}{A_2} \implies y = - \frac{A_1 C_2 - A_2 C_1}{A_1 B_2 - A_2 B_1} \]
Аналогично, \(x = \frac{B_1 C_2 - B_2 C_1}{A_1 B_2 - A_2 B_1}\) (обратите внимание на знаки).
Заметим, что знаменатель может оказаться нулем. Это означает, что векторное произведение векторов нормали нулевое, а значит прямые параллельны (в частности, это могут быть совпадающие прямые). Этот случай нужно обрабатывать отдельно.
Небольшой ликбез по объектно-ориентированному программированию в C++. Создадим класс, который будет отвечать за все операции с точками. В C++ есть два способа это сделать: через struct и через class. Их основное отличие в том, что по умолчанию в class все поля приватные — к ним нет прямого доступа снаружи. Это нужно для дополнительной защиты, чтобы в крупных промышленных проектах никто случайно ничего не поломал, но на олимпиадах это не очень актуально.
Точка \(\simeq\) вектор. Будем считать точка и вектор это один и тот же объект, так как они оба — это просто пара чисел. Будем сопоставлять точке её радиус-вектор — вектор из начала координат, ведущий в эту точку. По принятой в математике и физике нотации, будем обозночать вектора как r. Вы можете обозвать их как point, pt, vec — как угодно.
struct r {
double x, y;
r() {}
r(int _x, int _y) { x = _x, y = _y; }
};Функция r внутри класса вызывается при инциализации объекта. Её называют конструктором, и её можно указывать разную для разных параметров. Здесь r()вернёт точку с неопределенными (какие оказались в памяти в тот момент) координатами, а r(x, y) вернет точку с координатами \((x, y)\).
Давайте напишем функцию, которая принимает вектора и что-то с ними делает. Например, считает длину:
double len(r a) { return sqrt(a.x*a.x + a.y*a.y); }В C++ можно перегружать почти все стандартные операторы, например, +, -, << и т. д.
Переопределим для будущих нужд + и -:
r operator+(r a, r b) { return r(a.x+b.x, a.y+b.y); }
r operator-(r a, r b) { return r(a.x-b.x, a.y-b.y); }Скалярное произведение:
int operator*(r a, r b) { return a.x*b.x + a.y*b.y; }Векторное произведение:
int operator^(r a, r b) { return a.x*b.y - b.x*a.y; }Как вы думаете, как на самом деле работает cin >> x? Это тоже перегрузка оператора — >>. Делается это так:
istream& operator>>(istream &in, r &p) {
in >> p.x >> p.y;
return in;
}
ostream& operator<<(ostream &out, r &p) {
out << p.x << " " << p.y << endl;
return out;
}Мы могли не создавать никаких структур и работать с уравнениями, описывающими геометрические объекты. Такой подход будет популярен на олимпиадах по математике, а не по программированию. Когда математик говорит «пересечем две прямые», он представляет громоздкое уравнение, с которым он потом будет работать.
Программист же хочет абстрагироваться и просто написать intersect(a, b), в корректности которого он точно уверен. Программист хочет разбить задачу на много маленьких кусочков и делать по отдельности, а не возиться с формулами.
Приведем несколько примеров конструктивного подхода.
Прямую можно задать не через уравнение, а через два вектора \(a\) и \(b\):
\[ Ax + By + C = 0 \rightarrow r = at + b \]
Чтобы это сделать, достаточно выбрать две любые точки на прямой:
// даны A, B, C (A^2 + B^2 != 0)
r a, b;
if (eq(A, 0)) // значит, это горизонтальная прямая
a = r(0, -C/B), b = r(1, -C/B);
else
a = r(-C/A, 0), b = (1, -(C+B)/A, 1)Пусть нам надо отразить точку \((x_0, y_0)\) симметрично относительно заданной прямой \(ax+by+c=0\). Чисто в педагогических целях, начнём решать эту задачу как математики, чтобы никогда потом так не делать.
\[ \Pr_a b = \frac{a \cdot b}{|a|} \frac{a}{|a|} = \frac{|a| |b| \cos \alpha}{|a|} \frac{a}{|a|} = |b| \cos \alpha \frac{a}{|a|} \]
Геометрический смысл: длина на единичный вектор направления.
Мы не хотим раскрывать эти формулы покоординатно и предъявлять готовый ответ. Мы знаем, что он получится громоздким. Нам не жалко посчитать всё по частям — здесь нет смысла заниматься оптимизациями. Также мы хотим делать всё по частям, потому что так становится более наглядной логика алгоритма, и, как следствие, его проще дебажить.
// прямая r = at + b, точка c
r pr (r a, r b, r c) {
c -= b; // пусть c и a выходят из одной точки
return b + (a*b / len(a) / len(a)) * a;
}
r reflect (r a, r b, r c) {
return c + 2*(pr(a, b, c)-c);
}Первое правило действительных чисел — не использовать действительные числа
Все переменные типа double хранятся в компьютере неточно (ну а как вы представите ⅓ в двоичной системе счисления?). Поэтому при работе с даблами нужно всегда учитывать эту погрешность. Например, чтобы сравнить два дабла, надо проверить, что они отличаются по модулю меньше, чем на очень маленькое число eps:
const double eps = 1e-8;
bool eq (double a, double b) { return abs(a-b) < eps }Чтобы так не делать, старайтесь по возможности использовать только инты и абсолютную точность. Иногда есть трюки, позволяющие так делать: например, если в задаче все входные точки целочисленные и нас просят посчитать какую-то площадь, то можно все координаты домножить на два, и тогда ответ тоже будет целым (см. векторное произведение), который только при выводе нужно будет поделить на четыре.
Действительные числа так хранятся, что \(0\) и \(-0\) могут быть разными числами. Имейте это ввиду.
acos, asin и прочие обратные тригонометрические функций требуют, чтобы им на вход подавалось число от -1 до 1. Для безопасности, отмасштабируйте числа, перед тем как брать от них эти функции.